【成果推介】05号:ROFLY 优飞空地双模机器人
时间:2024-12-30 来源:控制科学与工程学院校友网 编辑: 作者: 访问次数:339
联络渠道:请点击此处登记
项目简介:
Rofly空地双模机器人是以四旋翼为主体,增加了从动式的地面移动结构,搭载了前沿的定位控制算法,可实现高性能的空地跨域移动能力。地面模式可大幅延长作业续航,空中模式可实现极好的飞行越障功能。机器人不依赖于GPS定位导航,凭借自身搭载的激光雷达、IMU、定位控制算法可实现在建筑物内、密闭空间、复杂地下等场所执行各种任务。还可根据需求搭载不同的载荷和作业探测设备,完成特殊侦查、特种检测、室内外测绘等任务。Rofly空地双模机器人是非常小巧灵活的空中加地面移动平台,还可在极其复杂的场景下实现自主定位、自主规划、实时建图、自主导航的功能。
应用场景:
Rofly空地双模机器人适用于建筑物内、密闭空间、地下管廊等各种危险和复杂环境下,包括但不限于:
① 高空特种检测及测绘场景应用,如:大型室内外起重机装备的高空检测应用,可大幅提高检测效率,提升检测人员的安全性;大型钢铁厂、化工厂复杂管道结构的测绘数字孪生应用,为用户进行后续的操作提供精准、有力、直观的三维数字图像;
② 竖向高落差狭小空间检测及测绘场景应用,如:电梯井的精确测绘应用,为电梯安装提供准备数据依据;大桥塔身的内部巡检应用,解决了人员巡检危险性高及效率较低的痛点问题;
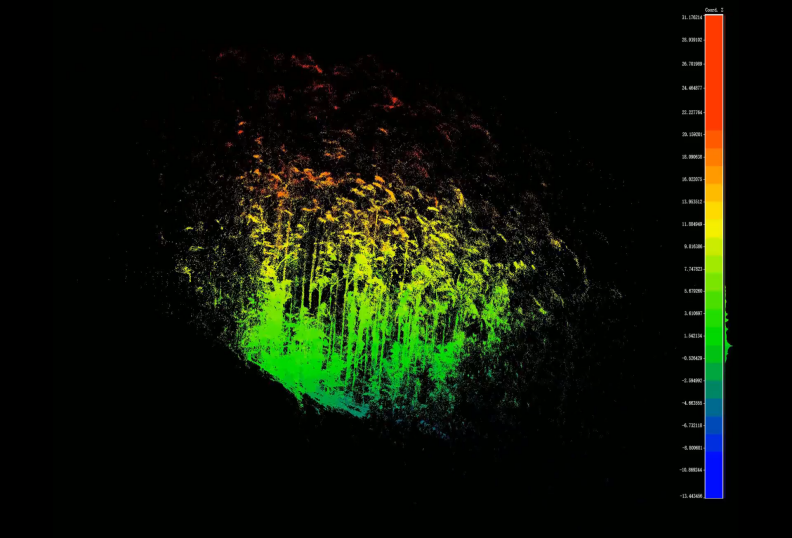
③ 面向林业的智能无人机双碳测绘场景应用,如:各种林地内林木的精确高效测绘应用,提供准备数据,支持双碳工作实施;
④ 灾后应急救援场景应用,如:布设定位基站,进入震后或火灾等紧急情况现场搜寻伤员,执行任务;
⑤ 交通领域巡检场景应用,如:市政及高速公路高架桥下,定期维护巡检工作,无人机可近距离爬壁或贴顶飞行巡检桥梁下方,提供巡检的精准度和效率;
⑥ 室内多场景巡检场景应用,如:地下管廊的仪器检查,机器人可以在地下管廊环境中执行检查任务;国家电网的电路、配电室巡检,利用机器人的空中视角和地面行驶能力从各个角度检查电路设备;
⑦ 复杂山洞、隧道的自主探索场景,如:通过机器人的多模态能力,可以进入山洞、隧道进行全自助导航探索,绘制三维点云地图;
盘煤盘粮应用场景,如:无人机进入煤仓或粮仓,通过地面和空中两种模式,高效的进行大规模煤仓粮仓的盘点工作,大幅提供工作效率和盘点的精准度,为企业生产提供科学准确的数据支撑。
团队简介:
本团队面向工业领域对自主无人系统所涉及相关智能技术的重大需求,依托浙江大学工业控制技术国家重点实验室,立足于浙江大学湖州研究院良好的政策环境和人才平台,借助于空中自主无人机及其集群的内在优势,围绕自主导航感知单元、室内外自主无人机等集成系统的开发,开展机器人自主导航、集群感知、规划、控制等关键技术的研究,力求成为国际领先的移动机器人团队。现阶段研发团队共计43人,包含博士后1人,博士生11人,硕士23人,本科生4人,工程师2人。
曹燕军(博士)浙江大学湖州研究院PI,毕业于加拿大蒙特利尔大学,博士期间前往德国图宾根大学及慕尼黑工业大学学术交流。曾带队参加深圳市“智创杯”前沿技术挑战赛锦标赛,凭借灾后救援多机器人系统获得三等奖(300万元奖励),曾获得加拿大蒙特利尔Hackatown智慧城市竞赛一等奖、加拿大蒙特利尔Implement Al人工智能竞赛二等奖、欧洲宇航局PANGAEA-X项目团队贡献奖等。承担来自国家自然科学基金委等重要课题,至今已发表顶级期刊及会议论文10余篇,授权发明专利2项。
应用案例:
该成果已在广西某国有林场桉树林实现测绘,大型电梯梯井测绘,金属壁厚测量,房屋空鼓测量。
相关图片: